Habe wieder etwas weitergemacht, hier zunächst etwas Mechanik.
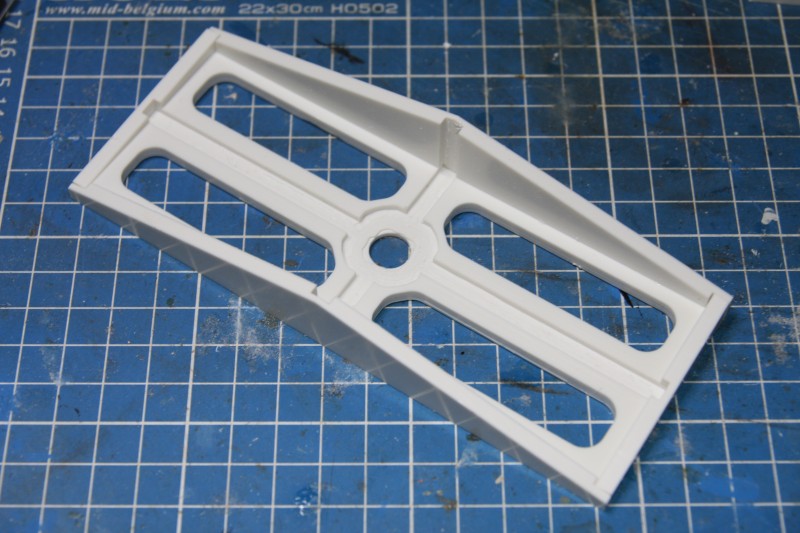
Irgendwie muss das ganze Ding ja am Ende entsprechend präsentiert werden, was ich durch ein Messingrohr tun werde, welches als Ständer dient. Modellinnenseitig ist dafür natürlich noch eine entsprechende Aufnahme nötig. Also habe ich etwas konstruiert und die Daten einem befreundeten Modellbauer geschickt, der daraufhin seine Fräse anwarf. Kurze Zeit später bekam ich den ersten Entwurf per Post.
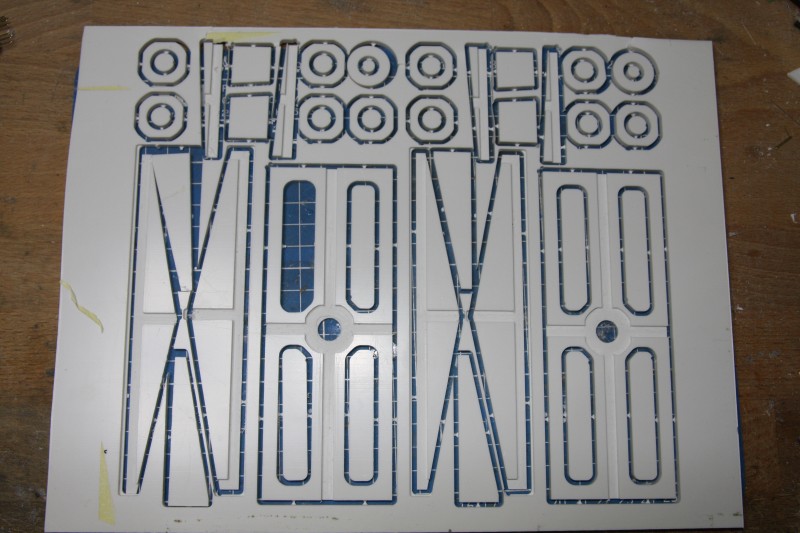
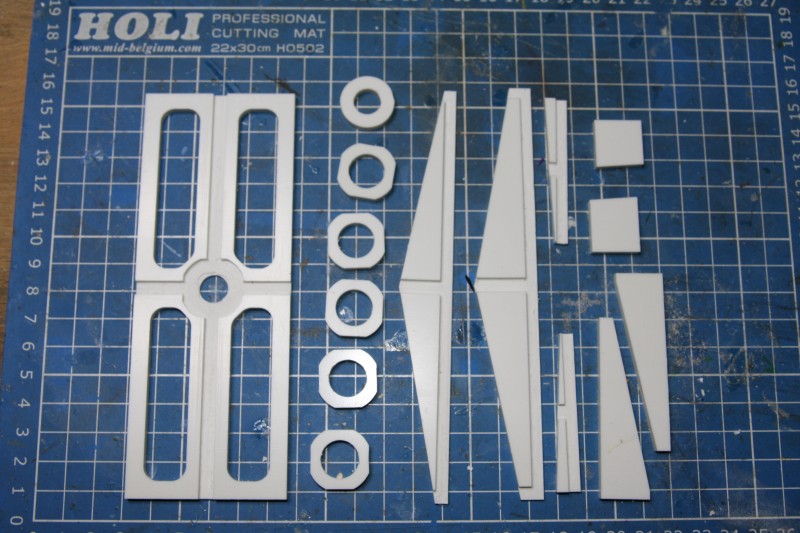
Dies sind Teile für zwei Halter, da ich für einen anderen ISD ebenfalls einen benötige. Zunächst also erstmal alle benötigten Teile herauslösen und grob versäubern.
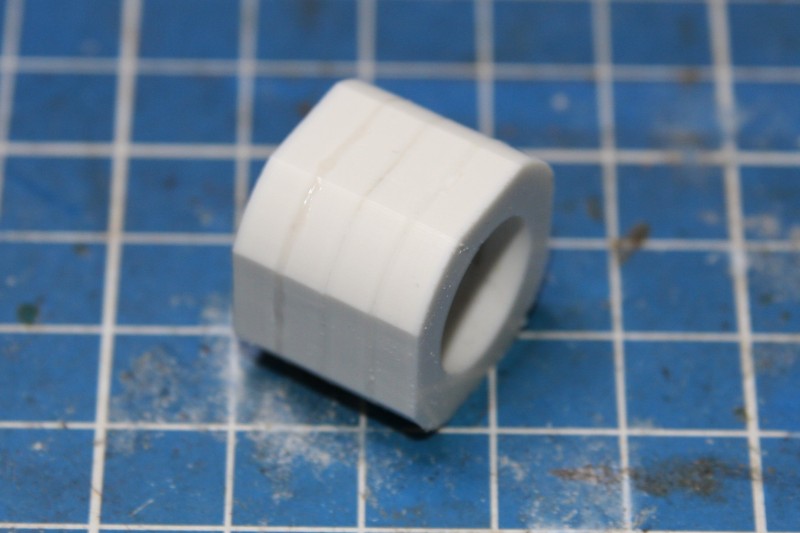
Begonnen habe ich mit dem Zentralstück. Dieses besteht aus mehreren Ringen, die übereinander geklebt werden. Ursprünglich sollte hier ein recht großes Rohr hinein, dass ich über ein Winkelstück schräg stellen wollte, um der ganzen Szene etwas mehr Dynamik zu verleihen. Das hat sich aber am ende doch erledigt, da mir das Ganze zu wuchtig wurde. Später wird hier noch ein Adapter hineinkommen, um ein dünneres Rohr aufzunehmen.
Anschließend wurden die beiden Seitenteile linksund rechts der Grundplatte verklebt.
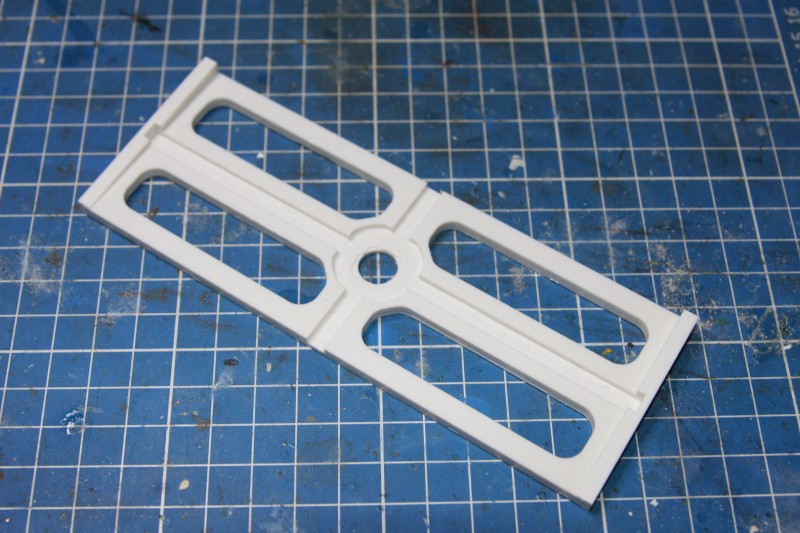
Danach folgten die vordere und hintere Abschlussplatte.
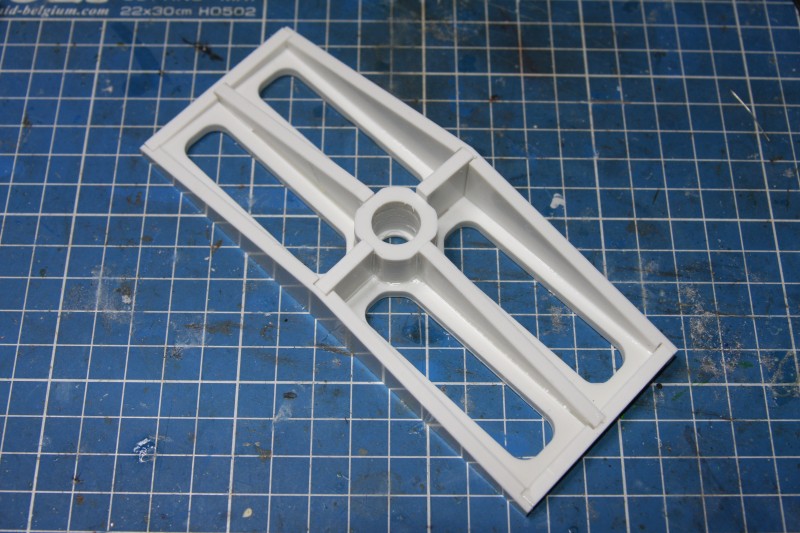
Nun die Rippen. Die beiden Querträger sind identisch, aufpassen muss man bei den Längsträgern. Die sind nur minimal in der Höhe unterschiedlich, außerdem ist eine Seite etwas angeschrägt.
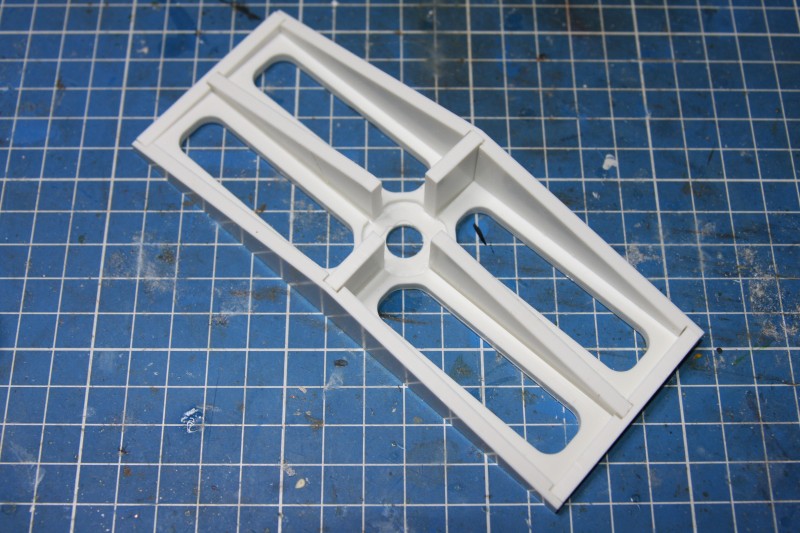
Am Ende wurde das Zentralstück eingesetzt. Was auffällt, ist dass noch ein Ringsegment fehlt. Das hat den Grund, dass zunächst noch die abschließende Kontur eingeschliffen werden muss. Die Teile sind ja fertigungsbedingt alle mit 90°-Kanten versehen, das muss noch entsprechend der Rumpfform angepasst werden.
Und ab damit ins Modell zum ersten trockenpassen. Das sieht jetzt sehr breit aus (was es auch ist), das hat aber seine Gründe: Durch den zweiten freihängenden ISD kommt ein gewisses seitliches Biegemoment auf den Halter, was entsprechend aufgefangen werden muss.
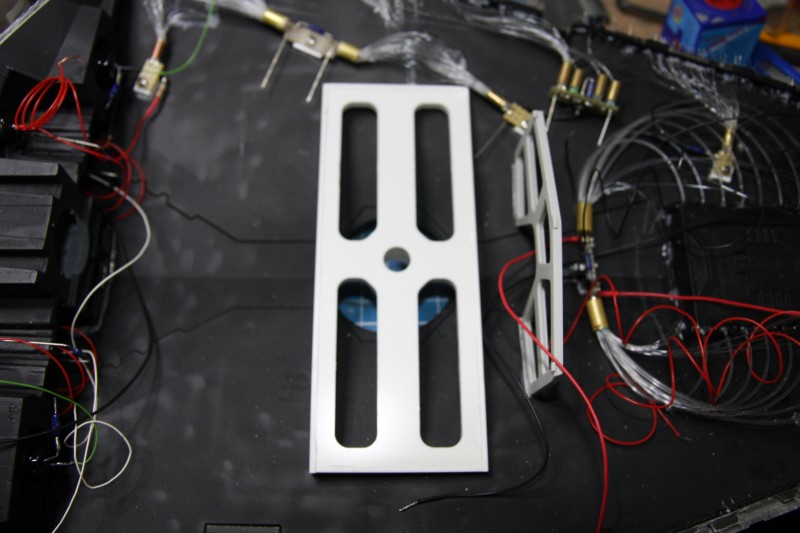
Blick auf die hintere Abschlussplatte. Bild ist leider etwas schlecht, was an der schwarzen Grundierung liegt. Der Luftspalt ist schön gleichmäßig, der Winkel zwischen Rumpf und Halter passt also schonmal im Groben. Lediglich auf den Seitenteilen liegt er derzeit auf, was aber noch weggeschliffen bzw. angepasst werden muss.

Aktuell ist der Halter noch mal in Überarbeitung, da die Stecknuten doch etwas breit geworden sind. Dadruch sind keine vernünftigen Klebenähte als Hohlkehle möglich. Für meinen zweiten ISD werde ich diesen Halter nehmen, dafür genügt das. Fast genau unter dem Reaktor befindet sich ja der Schwerpunkt des Modells, da treten dann kaum Biegekräfte auf. Aber für das Diorama bin ich noch nicht ganz glücklich.
Hier nun der zweite Teil, der vermutlich für die meisten etwas abstrakt ist: "Alles ist besser mit Bluetooth!"

Im Herzen des Schiffes werkelt ja später ein Arduino Mega 2560, der auch richtig zu tun bekommt. Ich hatte ja ursprünglich vor, die Parameter der Software mittels einer Seriellen Schnittstelle programmieren zu können. Dafür braucht es nur drei dünne Drähte, und ich muss nicht immer das ganze Programm neu aufspielen, nur weil ich mal etwas an der Helligkeit der Triebwerke oder am flackern des Feuers geändert habe. Aber wie so häufig kommt man ja abends auf dumme Ideen, und so stieß ich auf Bluetooth-Module, die sehr gut mit dem Arduino funktioneren. Nach einem ersten Blitzgedanken ("Per Funk wäre das schon cool!"

), lies mich das nicht mehr los, und ich orderte eine entsprechende Platine.
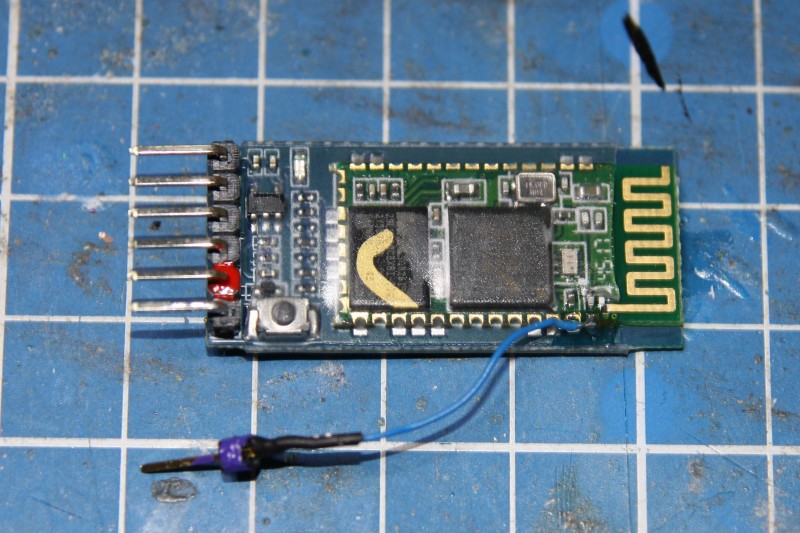
Die hier habe ich schon etwas modifiziert, dazu gleich mehr. Es handelt sich um ein sog. "HC-05"-Modul. Es gibt auch noch das "HC-06", das aber weniger kann und genau soviel kostet (ca. 7-9€/Stück, je nach Anbieter).
Es gibt bereits modernere Module (z.B. das HC-10), die auch Bluetooth 4.0 beherrschen. Ich habe es aber ums verrecken nicht vernünftig zum laufen bekommen, weswegen ich das verworfen habe. Die Hauptunterschiede liegen in der höhreren Geschwindigkeit und Reichweite (für meinen Anwendungsfall unerheblich) sowie im geringeren Stromverbrauch (ebenfalls unerheblich, da ich das Modul nur bei Bedarf anschalte und es eh durch das Netzteil versorgt wird). Für mobile Anwendungen mit einem kleinen Akku wäre das allerdings zu bedenken.
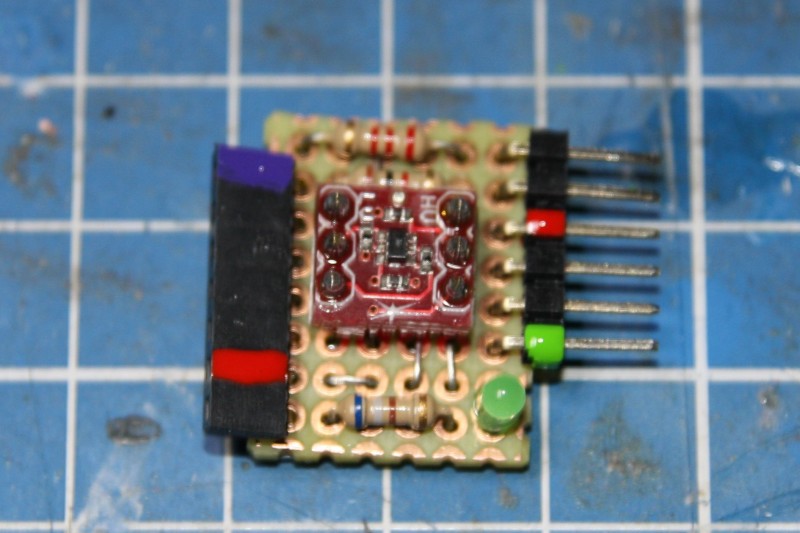
Dann ging es los: Wie bekomme ich das Ding zum laufen? Die Stromversorgung erfolgt idealerweise über 5V, die Sende-, Empfangs- und Prog.-Leitung kommen allerdings nur mit 3,3V klar. Die Antwort war ein Pegelwandler, der zwischen die Datenleitungen des FDTI-Prorammers (5V) und des HC-06 (3,3V) gehängt wird. Früher waren die Dinger etwas knifflig. Der hier verwendet jedoch einen raffinierten Schaltungstrick, da es eigentlich nur zwei MOSFETs sind, die entsprechend verbunden wurden. Ergebnis: Das Ding ist absolut winzig und spottbillig (ca. 1€/Stück).
Also flugs eine entsprechende Platine gelötet...
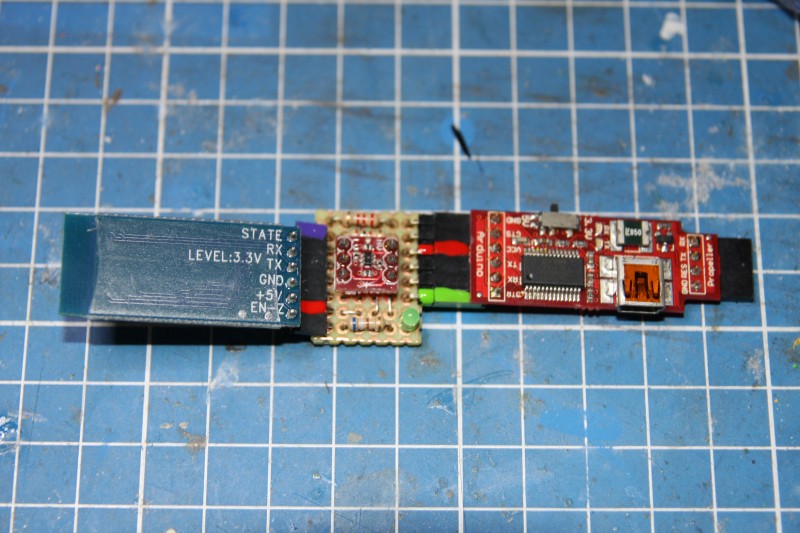
... und alles angeschlossen. Hier kann man jetzt auch sehen, wozu die extra Leitung am Board ist: Dies ist der berühmte Pin 34, der während des Einschaltvorganges 3,3V+ haben muss (hier der Lila-Anschluss), damit man in den sogenannten AT-Modus belangt. In diesem speziellen Betriebsmodus lassen sich jetzt der Name, Passwort, Übertragungsgeschwindigkeit, etc. einstellen.
Das hätte man seitens des Boardherstellers auch eleganter lösen können, aber was solls. Am längsten hat es noch gedauert, überhaupt dahinter zu kommen. Der eigentliche Umbau war innerhalb einer Minute erledigt.
Links das HC-05, rechts ein FTDI-Board. Welches man nimmt, spielt keine große Rolle. Die sind im Grunde fast alle gleich.
Anschließend lässt sich über den seriellen Monitor das Modul programmieren. Ich habe lediglich den Namen und den Key geändert, damit nicht jeder sich da einloggen kann. Und dann der große Moment...
Bluetooth am Labtop eingeschaltet, neue Geräte suchen lassen, etwas klicken, Nummer eingeben und Bingo! Da ist es in der Geräteliste und kann verwendet werden.


Ich habe das natürlich gleich entsprechend ausprobiert und es funktioniert einwandfrei. Konnte über ein kleines Terminal-Programm problemlos von meinem Labtop aus mit dem Arduino in beide Richtungen kommunizieren. Mission erfolgreich!
Die gute Frage natürlich zum Schluss:
- Braucht man das unbedingt? Nö!
- Warum tut man das? Weil man es kann!

Falls gewünscht, kann ich das Thema im Elektronik-Bereich in einem separaten Thread noch mal etwas ausführlicher behandeln, das hier ist nur ein kurzer Anriss. Ich sah das auch mehr als erste Schritte im Bereich der Funkkommunikation an, die ich in Zukunft noch mal für einen 1:16 "Gepard"-Panzer benötige. Dem will ich einen Automatik-Modus spendieren, dafür muss aber die Wanne mit dem Turm sprechen können.
Und es hat doch irgendwie etwas herrlich dekadentes, sich mit seinem Tablett aufs Sofa zu lümmeln, und von dort das Licht in seinen Modellen an- und auszuschalten.

